Download this discussion sheet in docx format
Download this discussion sheet in pdf format

Executive summary
- The key barriers to Disabled people’s cycling will not be addressed by increasing maximum e-assist pedal cycle (EAPC) motor size and throttle speeds.
- We believe that better access to EAPCs with lower (4-12mph) maximum throttle speeds and exemptions for handcycles and wheelchair carrying cycles to have higher powered motors, would improve access to cycling for some Disabled people.
- The current government proposals carry high risk of causing significant overall harm to Disabled people’s mobility through:
- Increased risk to Disabled people from EAPC riders;
- Increased negative perceptions of cycling leading to increased access restrictions such as physical barriers and PSPOs, both of which routinely prevent many Disabled people from using cycles as mobility aids.
- We would welcome investigation of measures to improve access to cycling for Disabled people without increasing risk to others walking/wheeling & cycling.
- Development of a new motorcycle category could facilitate use of higher power and heavier e-cycles on carriageways only, with safety regulations & licencing of use.
- We would welcome development of national guidance on safe use of all cargo-carrying cycles, including loading, rider sight lines and brake function.
- Making delivery companies responsible for the safety and legality of their riders’ cycles and cycling could reduce risk, improve public opinion and increase business viability for cycle delivery firms.
Regarding throttle maximum speed, we call for:
- Clarity in guidance that 3.73mph/6kph throttles are already legally permitted on all EAPCs.
- Research and consultation into permitting throttles at speeds above 3.73mph without type rating, specifically considering:
- The potential to improve Disabled people’s mobility using bicycles, by permitting higher throttle maximum speeds to above the guidance minimum design (balance) speed of 7mph/12kph (LTN 1/202.1).
- Maximum throttle speeds from 8mph to 12mph/20kph (current class 3 “invalid carriage” top speed to current e-scooter top speed in Germany, Italy, Denmark, Norway etc).
- Potential to align EAPC, “invalid carriage” and micro-mobility speed limits.
Regarding increased motor power, we call for:
- E-assist pedal cycle motor power to remain at 250W by default;
- Specific limited exemptions for higher motor power (potentially >500W):
- Where needed by Disabled people:
- Handcycles – power input by the cyclist will always be low;
- Heavy cycles used by Disabled people, e.g. wheelchair transporter cycles
AND
- Where safety of others will not be compromised:
- Consider reducing maximum e-assist speed for heavier cycle types
Our approach
Mobility Justice:
- Targeting resources towards those who have least access to transport and mobility rather than those with the most mobility privilege.
“Parties shall take effective measures to ensure personal mobility with the greatest possible independence for persons with disabilities, including by facilitating the personal mobility of persons with disabilities in the manner and at the time of their choice, and at affordable cost.” – United Nations Convention on the Rights of Persons with Disabilities article 20(a)
Key facts when considering all proposals:
- Disabled people make time-sensitive journeys for employment, education, healthcare, in caring roles, for errands and for leisure.
- Compared to non-Disabled people, Disabled people are more likely to live in poverty, less likely to have access to a private vehicle and less likely to be able to use public transport.
Legislation changes for e-assist pedal cycles (EAPCs) must improve:
- Safety – for Disabled people and others walking/wheeling & cycling, in public and in private spaces – including when stored and during charging.
- Accessibility – for example, Disabled people are able to obtain, store and use e-cycles of types which work for us, facilitating Disabled people’s mobility.
The proposed e-assist pedal cycle legislation changes
Throttles –
Proposal to increase permitted throttle speed for e-assist pedal cycles (EAPCs) from 3.73mph (6kph) to 15.5mph without type or individual approval.
Motor power –
Proposal to increase permitted continuous motor power from 250W to 500W.
The proposals suggest that these changes will benefit Disabled people and delivery firms. It is suggested in the impact assessment for the proposals that cargo cycles carrying 600kg could become feasible with the introduction of 500W motors for EAPCs.
In this briefing, we discuss how throttles and motors work, how they are regulated under current legislation, how other related features of e-cycles work more broadly, and how Disabled people’s access to cycling can be improved.
Throttles
Throttle basics:
- EAPCs must have working pedals that can move the cycle forwards.
- Sensors near to the pedals normally control the motor on an EAPC.
- Throttles are switches which control a motor. They can operate alongside sensor control or without motor sensors.
- Throttles are essential to enable some Disabled people to use cycles:
- Throttles enable easier starting, especially on hills or if accidentally in a high gear (including if gears break);
- Throttles enable a person to ride to safety even if pedalling becomes too difficult for any reason.
- Presently, EAPCs may have throttles control up to 3.73mph, or 15.5mph with type or individual approval.
- The current proposals would permit all EAPCs to have throttle control to 15.5mph.
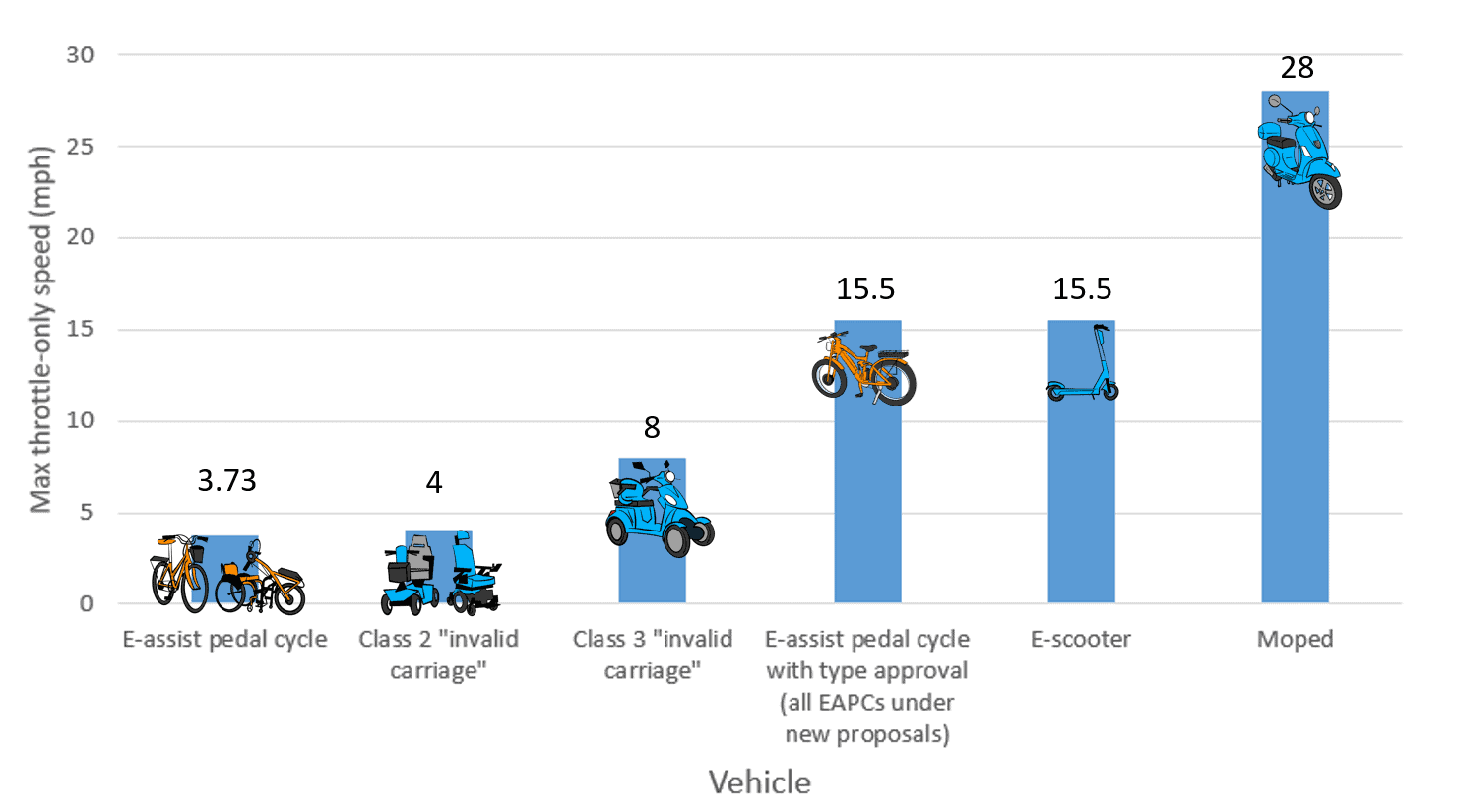
Current maximum throttle-only speed for EAPCs and similar devices
Link to source spreadsheet for graph
Considerations around throttle maximum speeds
- We are concerned that 15.5mph is too fast for e-scooter throttle cut-out and too fast as a maximum throttle speed for EAPCs. Use of a throttle and power control via pedalling are very different. Default higher-speed throttles could potentially permit excessive power to be more easily applied in inappropriate situations, increasing danger to riders and other users of public spaces, and especially to Disabled pedestrians.
- Better awareness of the legality of 3.73mph/6kph throttles and widespread availability of these throttles would benefit Disabled people, in particular by making starting on hills much easier.
- We would welcome research into safety and accessibility factors of permitting higher maximum throttle speeds of above the general bicycle minimum balance speed of 7mph/12kph (LTN 1/202.1), potentially aligning with the class 3 “invalid carriage” speed of 8mph to the 12mph/20kph current e-scooter top speed in Germany, Italy, Denmark & Norway.
Motors
Motor basics:
- Motors on EAPCs provide power to help propel the cycle.
- EAPCs have motor power when a rider is pedalling, up to the 15.5mph maximum motor speed cut-out.
- A throttle allows an EAPC motor to run without the rider pedalling.
- The present maximum continuous power of an EAPC motor is 250W.
- Multiple factors including motor location, sensor type, presence of throttle, gearing, cycle type, weight, rider strength, gradients, surface types etc will affect how effective a motor is, whatever the power of that motor.
- Increased motor power is intended to increase the maximum usable loading mass of e-cycles. Heavier vehicles have higher kinetic energy at any given speed.
- Increased motor power will increase the maximum potential acceleration of e-cycles.
Acceleration and kinetic energy are related to power, speed and mass.
Increasing acceleration and kinetic energy will increase the risk a vehicle presents to those around it.
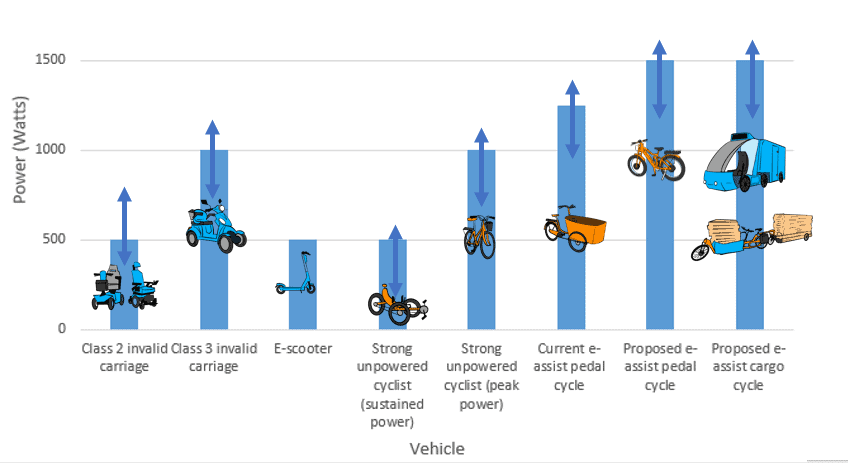
Estimated peak power for EAPCs and similar devices
Link to source spreadsheet for graph
- Most cyclists can pedal with continuous power well under 500W: Only very strong cyclists can produce 500W over a prolonged period.
- E-assist motor power at 250W essentially gives most people the cycling power of a professional cyclist: These graphs assume e-cycle riders are very strong for purposes of assessing safety of these devices – it is a reasonable edge case scenario likely to apply to professional delivery riders but not to the general public.
- Devices without pedals can safely have higher motor power because rider power is not added to the motor, and the heavier of these devices (class 3 “invalid carriages”) are restricted to lower speeds.
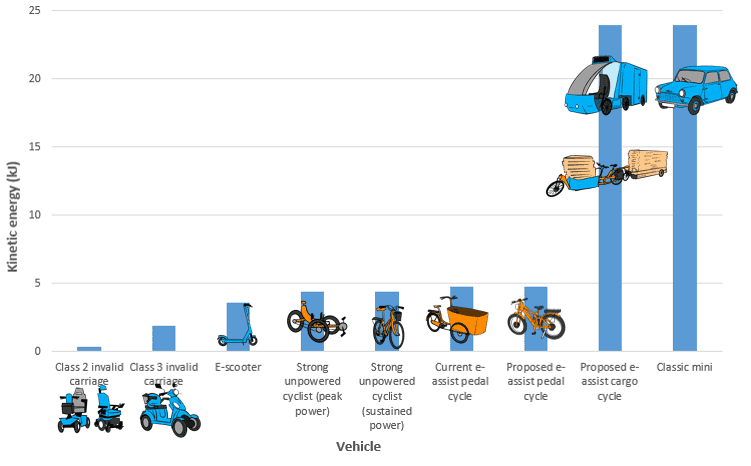
Kinetic energy of EAPCs and similar devices
Link to source spreadsheet for graph
Kinetic energy considerations:
- Graph assumes class 2 “invalid carriage” moving at 4mph, class 3 “invalid carriage” moving at 8mph, e-scooter moving at 15.5mph and all cycles moving at 20mph for likely peak routine “urban” use speeds.
- Increased kinetic energy directly relates to injury risk in case of collisions.
- Increased kinetic energy increases stopping distance – brakes must dissipate all the kinetic energy for a cycle to stop: Many standard cycle braking systems will not be suitable for proposed large cargo vehicles.
A 600kg cargo cycle is much more comparable to small car than to other cycles: It should be licenced and regulated as a motor vehicle to mitigate risk to others using public spaces.
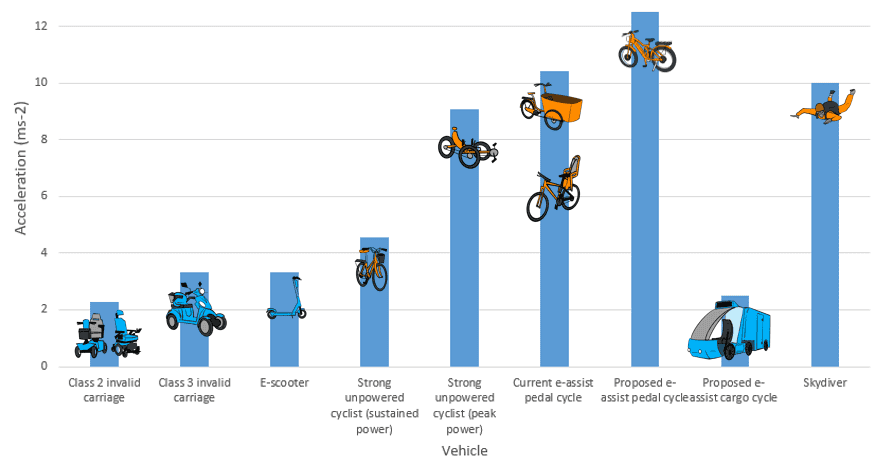
Potential peak acceleration of EAPCs and other similar devices
Link to source spreadsheet for graph
Peak acceleration considerations
- Peak accelerations will be reached for a second or two at a time – especially on starting, potentially including in constrained or busy spaces.
- Lightweight cycles, including delivery e-cycles, can achieve very high accelerations comparable with a skydiver just after they jump out of a plane (assuming the cyclist can avoid skidding).
- High acceleration increases risk and perception of risk for people sharing space with these cycles, and especially for Disabled people who may be less likely to perceive the cycles and/or less likely to get out of the way.
- Increasing motor power on lightweight e-cycles would increase peak accelerations and so increase risk and perception of risk of these devices to others.
Factors affecting how effective e-cycle motors are:
Location of motor
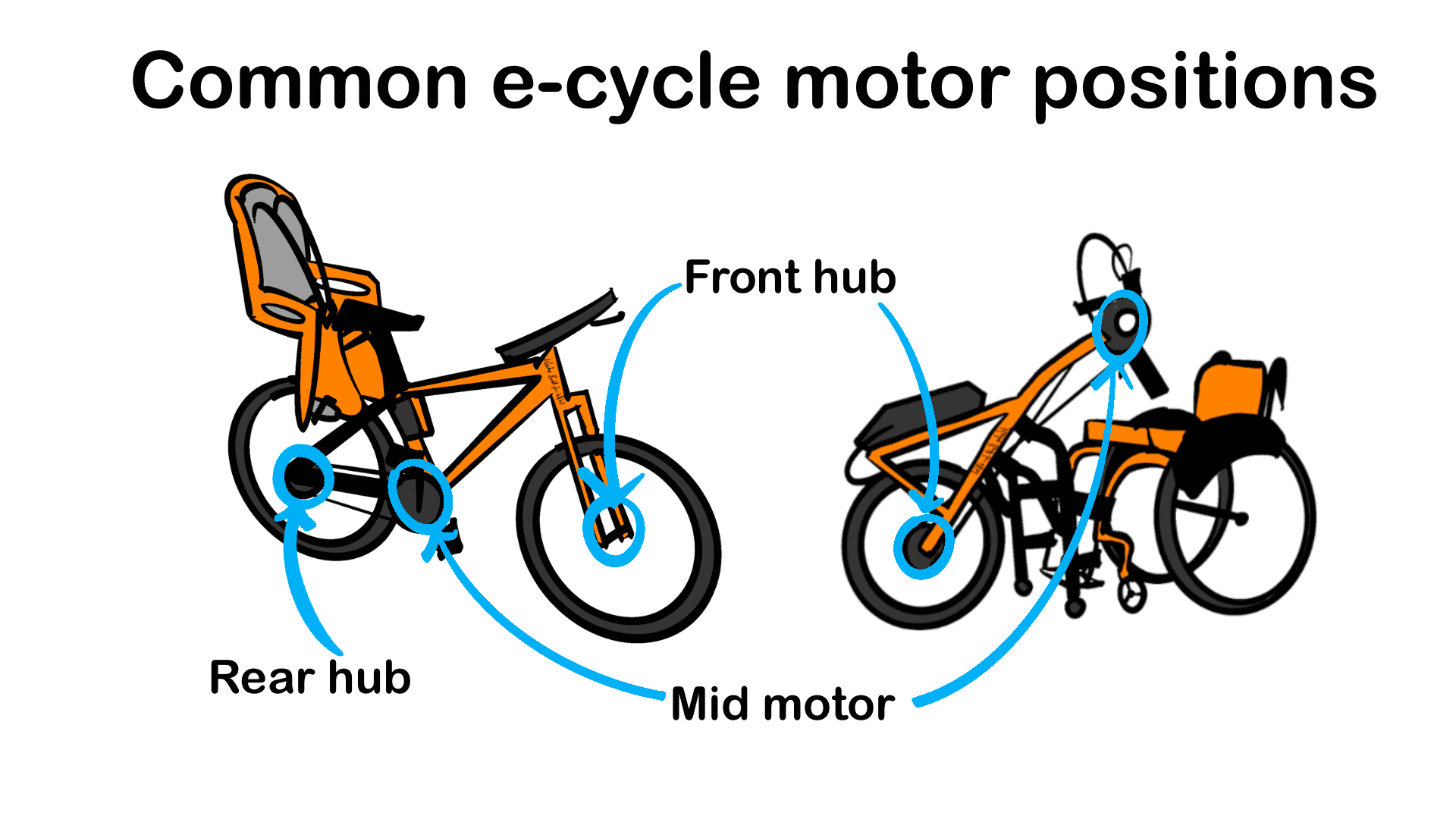
Hub motor: Motor does not benefit directly from gearing of the cycle and pedalling effort of the rider. This means the motor is more likely to cut out on steeper hills or on otherwise difficult terrain and less able to provide starting assistance.
Mid motor: Motor benefits from cycle gears and rider effort. This means the motor is more able to assist with starting, and less likely to reach maximum torque and cut out on hills and difficult terrain.
Could encouraging use of mid motors rather than hub motors reduce need for higher powered motors?
Sensor type
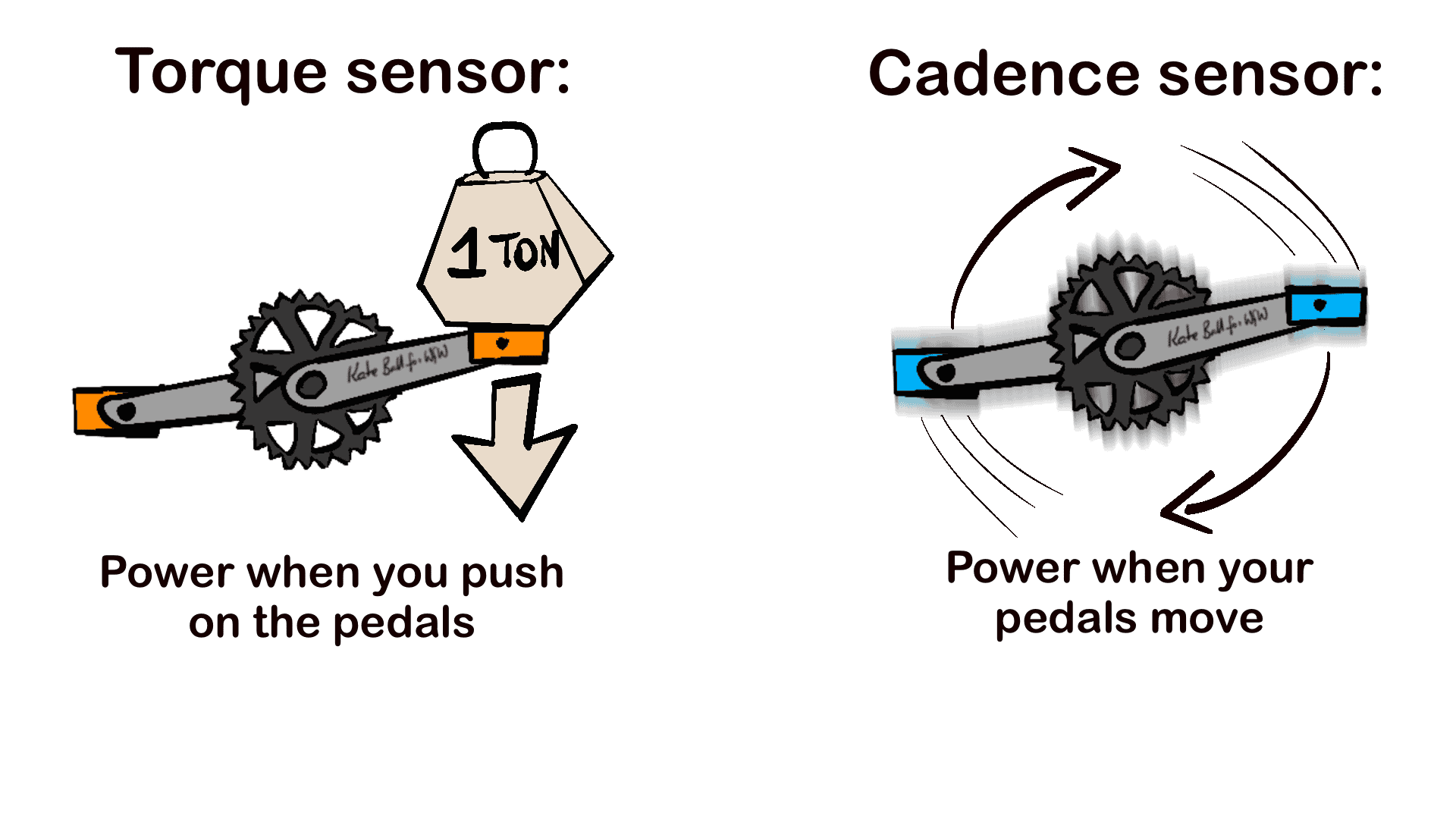
Torque sensor: Motor can start as soon as a rider presses on the pedal, and can give extra power as the rider pushes harder. Torque sensors can make starting easier and provide better help on hills. Often used with mid motors and on more expensive hub motor e-cycles.
Cadence sensor: Motor requires the pedals to be turning to operate, meaning there can be no starting assistance unless the cycle has a throttle. Motor power may decrease or cut out as pedalling speed decreases on hills, especially if the cycle has inadequate gearing.
Could encouraging use of torque sensors rather than cadence sensors reduce need for higher powered motors?
Gears
Some e-cycles rely on e-power levels to give the effect of gears, or have very limited gear ratios. These e-cycles are more likely to struggle on hills and difficult terrain than e-cycles with wide gear ratios in addition to e-assist.
Could educating e-cyclists and potential e-cyclists on gearing options reduce need for higher powered motors?
Cycle type
Some cycle types frequently used by Disabled people may need higher motor power as the rider power input will always be limited.
We would like to see research into whether handcycles in particular would benefit from permission to have higher powered motors than foot-pedalled cycles to enable a wide range of users to ride utility journeys in hilly locations – especially as handcycle geometry means most of these devices use hub motors rather than mid motors.
Handcyclists are likely to benefit from specific exemptions to use higher powered motors.
Combined rider and cycle mass
Higher combined rider and cycle mass will increase the force needed to move a cycle, especially when going uphill, and the braking force required to stop a cycle, especially when going downhill.
Some cycle types frequently used by Disabled people may need higher motor power since their total mass will be high.
We would like to see research into whether wheelchair transporter cycles and other similar devices would benefit from permission to have higher powered motors than the default 250W, potentially with a reduced maximum motor cut-out speed to mitigate risk of use of these vehicles on cycle lanes and shared spaces. This could increase the viability of using larger cycle types for utility journeys for some Disabled people.
Wheelchair transporter cyclists are likely to to benefit from specific exemptions to use higher powered motors.
Rider strength, gradients, surfaces and more
A huge range of factors will additionally affect usability of e-cycles and the likelihood of motors reaching maximum torque (at which point they may cut out) in different situations.
Better awareness of cycle design factors affecting ease of riding and motor effectiveness is likely to benefit many cyclists and potential cyclists.
Motor power safety considerations
General:
- Heavier / very high-acceleration vehicles should not mix with pedestrians and cyclists.
- Heavier vehicles need different specifications from lightweight cycles, and need regular safety checks – especially of brakes.
Delivery cycles:
- Delivery sector regulation is needed to make companies responsible for the safety and legality of their riders’ cycles and cycling. We believe this could be a highly effective option to reduce illegal e-motorcycle prevalence and pressure on delivery cyclists to ride dangerously.
- National guidance / standards for safe loading, rider sight lines, maintenance and use of cargo cycles are needed.
Barriers to cycling for Disabled people
Disabled people’s barriers to cycling
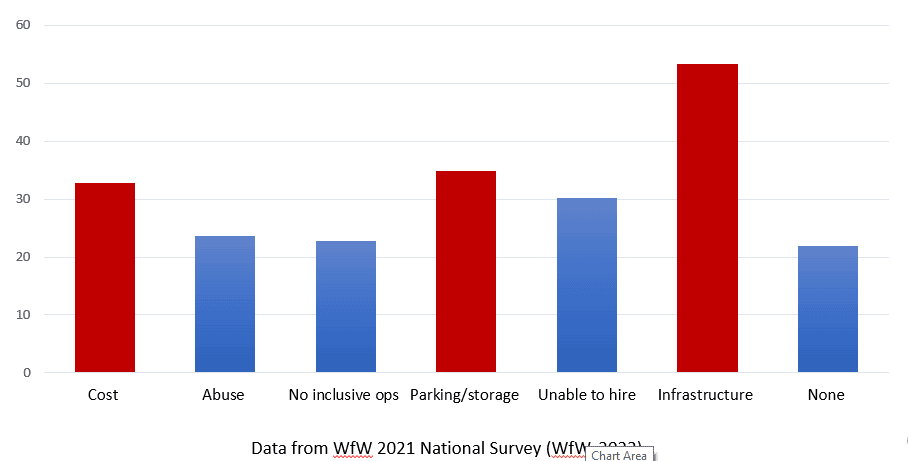
Wheels for Wellbeing 2021 National Survey of Disabled Cyclists
Measures to remove barriers to Disabled people’s cycling
- Recognition of cycles as mobility aids – including the right for Disabled people to use cycles at walking speed in pedestrian spaces;
- Continuous, safe, accessible routes – to at least LTN 1/20 standards;
- Sufficient safe, accessible and secure cycle parking and storage – at homes and destinations;
- Funding for e-cycles and other cycles for Disabled people.
- Accessible multi-modal journeys – enabling Disabled people to take our cycles and larger mobility scooters on buses, trams, trains and coaches;
Disabled people tell us that the main barriers to cycling are a lack of safe and accessible cycle routes, lack of storage, cost of cycles, lack of opportunity to try suitable cycles and abuse.
We call for action to remove these barriers to improve active travel access for Disabled people.
For more information please see our:
Resources and guidance sheets page – including regular new updates